Publications
* denotes equal contribution. See also my Google Scholar profile.
Conference Papers
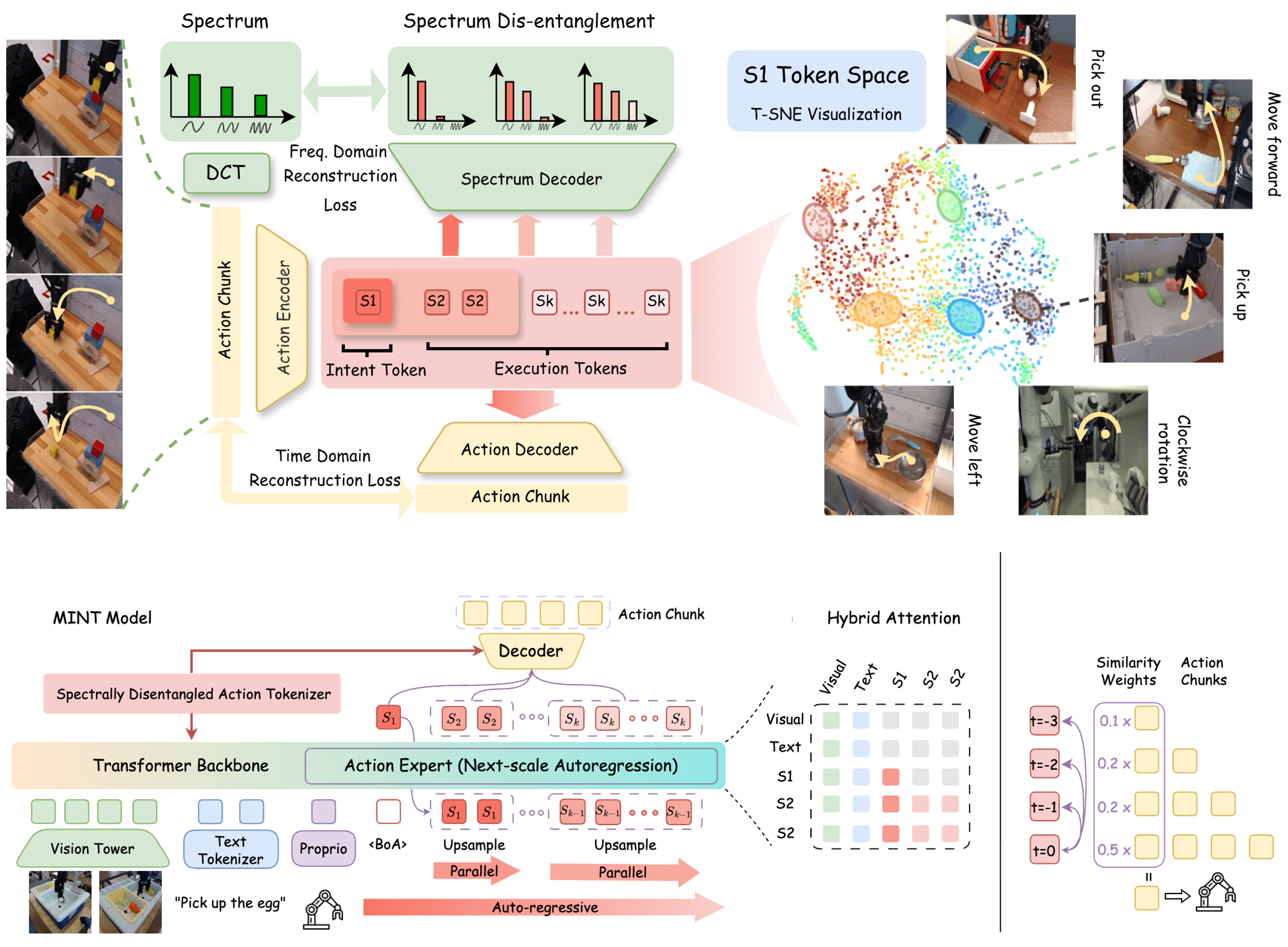
Renming Huang, Chengyang Zeng, Weichao Tang, Junyi Cai, Cewu Lu, Panpan Cai
Robotics: Science and Systems RSS 2026 arXiv Code — We propose learning to mimic the underlying intent of demonstrations rather than directly copying trajectories, enabling more robust and generalizable robot behavior.
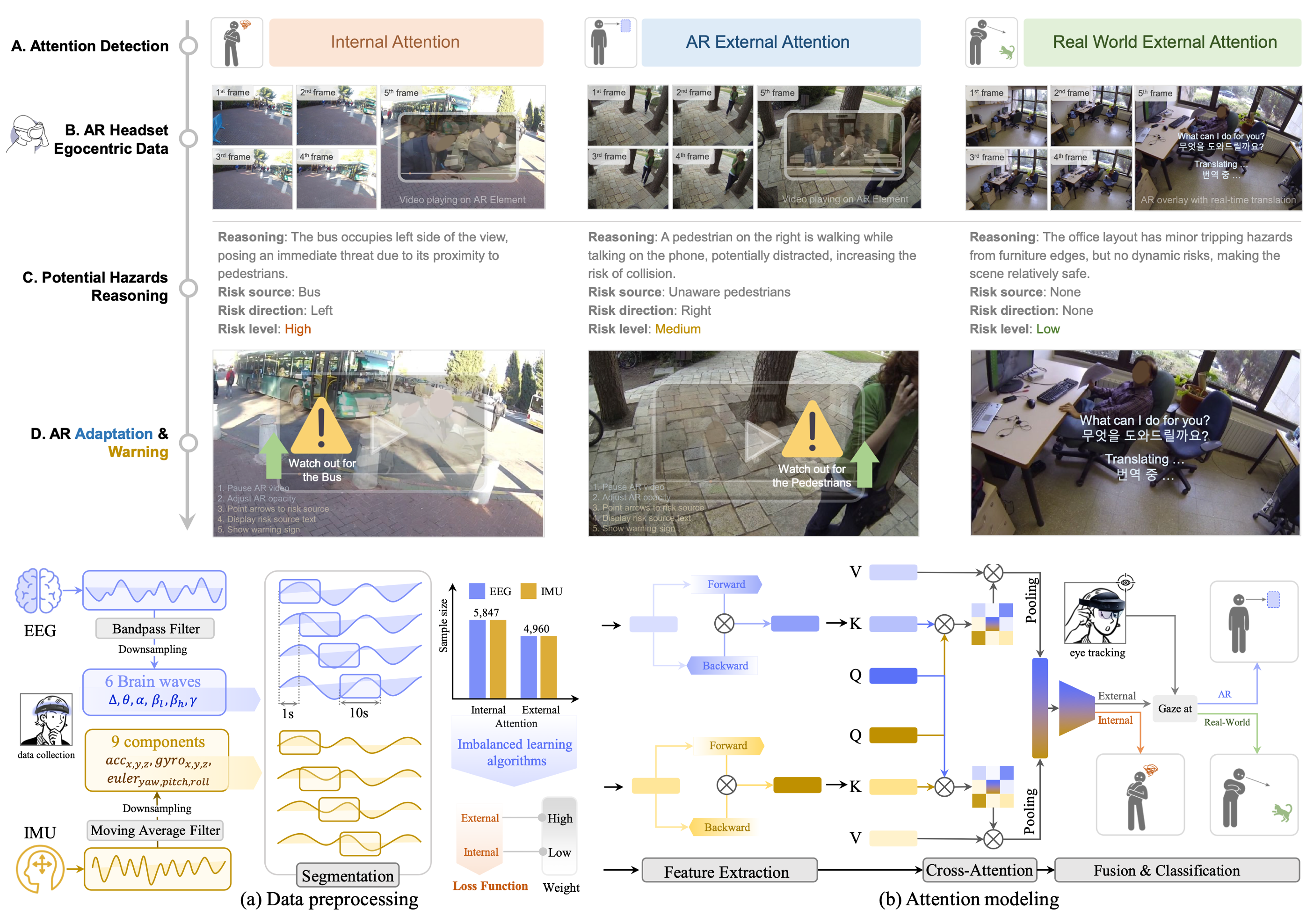
Yuying Pei, Renming Huang, Mingzhi Zha, Guansong Wang, Peng Wang, Qi Kang, Yang Yang, Heng Tao Shen
Proceedings of the 38th Annual ACM Symposium on User Interface Software and Technology UIST 2025 Paper —
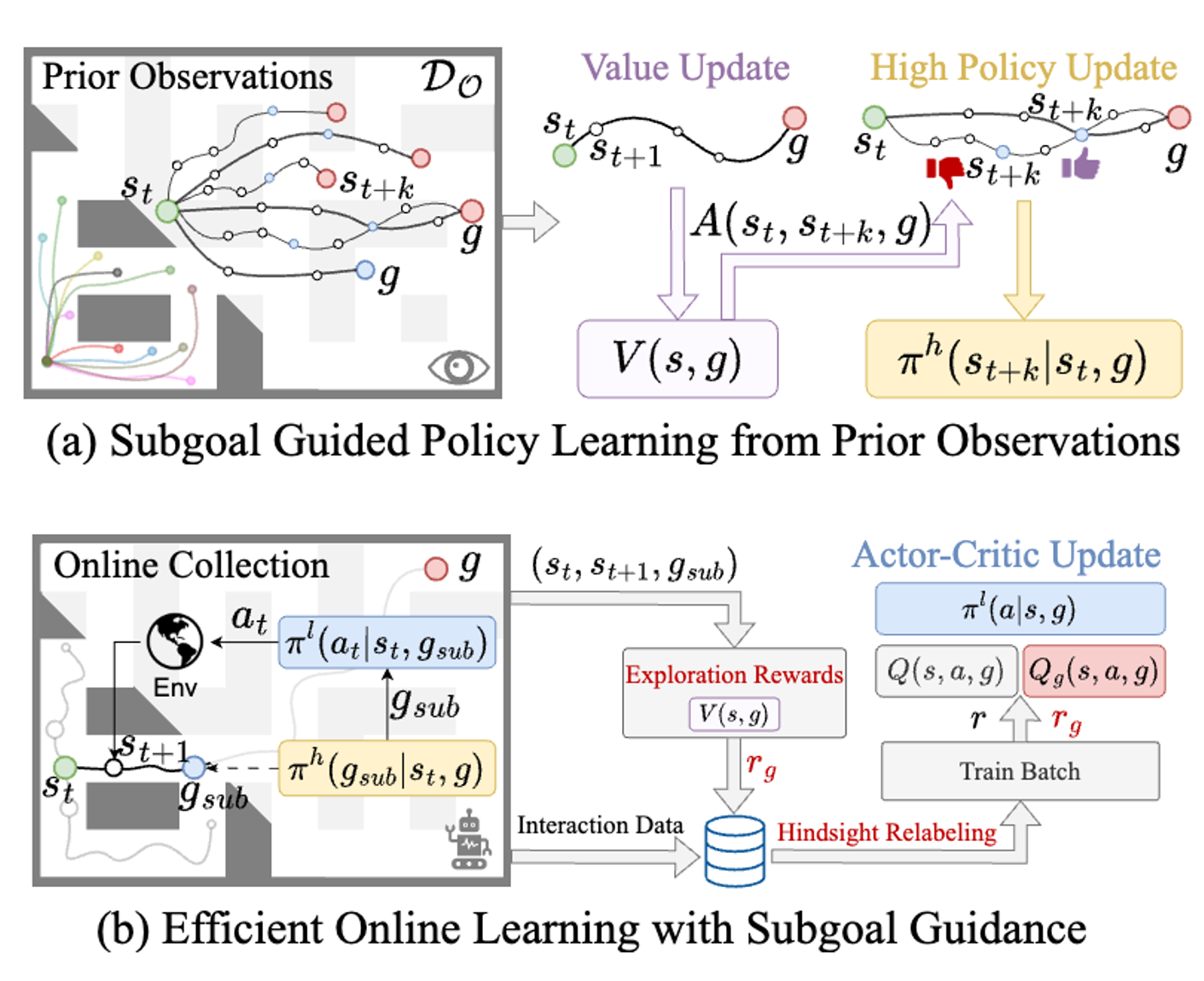
Renming Huang, Shenyu Liu, Yuying Pei, Peng Wang, Guansong Wang, Yang Yang, Heng Shen
Conference on Robot Learning CoRL 2024 arXiv — We propose a subgoal-guided imitation learning framework that enables goal-reaching policy learning from non-expert, suboptimal observations without requiring expert demonstrations.
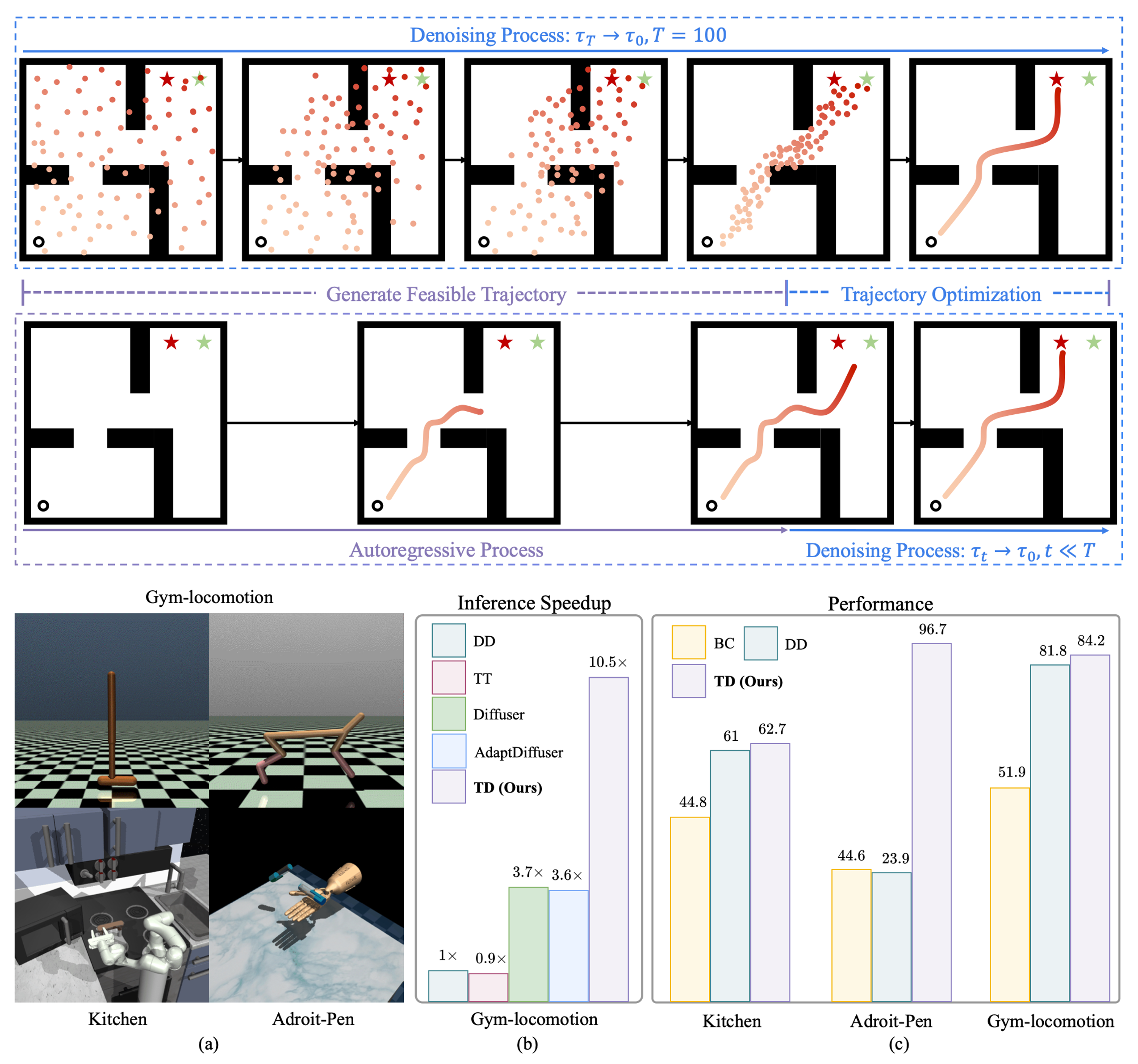
Renming Huang, Yuying Pei, Guansong Wang, Yanjiang Guo, Yang Yang, Peng Wang, Heng Shen
European Conference on Computer Vision ECCV 2024 arXiv — We leverage diffusion models as trajectory optimizers for offline reinforcement learning, achieving efficient planning by treating diffusion sampling as an optimization process.
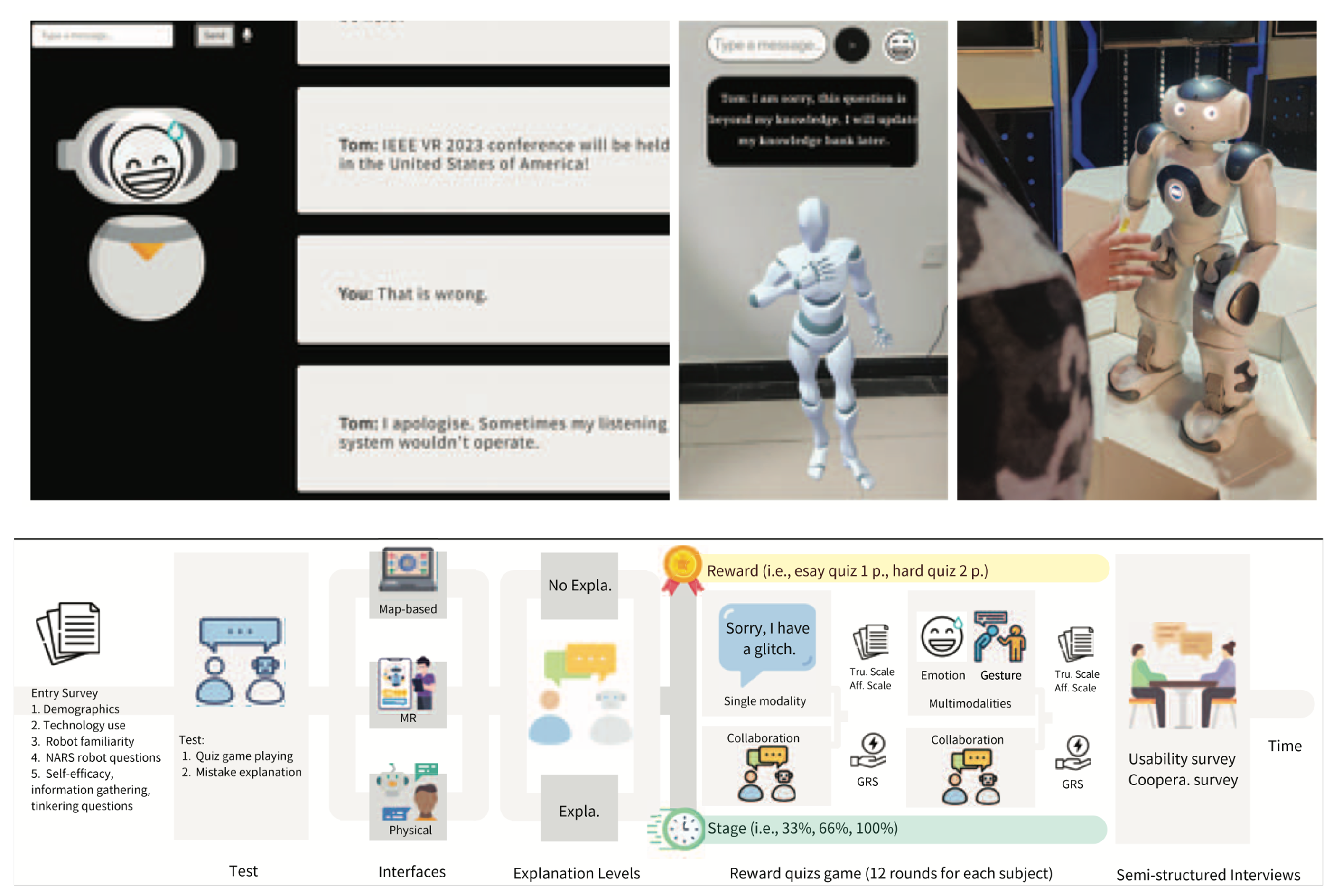
Yuying Pei, Renming Huang, Guansong Wang, Yang Yang, Ning Xie, Heng Tao Shen
2023 IEEE Conference on Virtual Reality and 3D User Interfaces IEEE VR 2023 Paper — A multimodal apology system using WebXR to investigate how virtual companions can repair trust after service failures through synchronized verbal and nonverbal cues.
Preprints
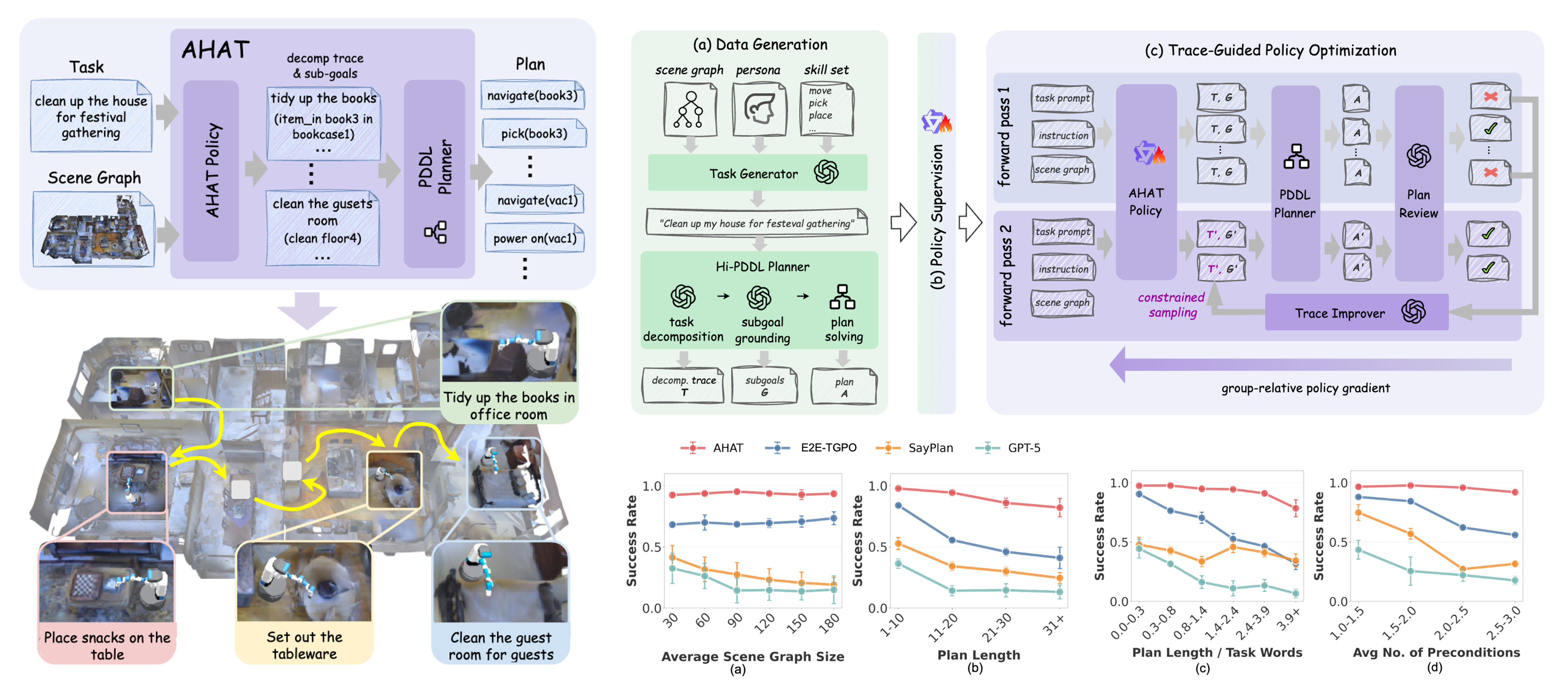
Zhihong Liu, Yang Li, Renming Huang, Cewu Lu, Panpan Cai
arXiv preprint arXiv arXiv — A scalable framework for long-horizon task planning that generalizes across diverse house layouts and abstract human task specifications.