Poster

Sitemap
A list of all the posts and pages found on the site. For you robots out there, there is an XML version available for digesting as well.
Pages
Poster
Renming Huang
Poster
CV
Poster
Poster
Poster
Projects
Poster
Publications
Poster
Sitemap
Poster
Poster
Poster
Poster
Poster
Poster
Markdown Generator
Poster
Poster
Poster
Posts
portfolio
Poster
Portfolio item number 1
Poster
Portfolio item number 2
publications
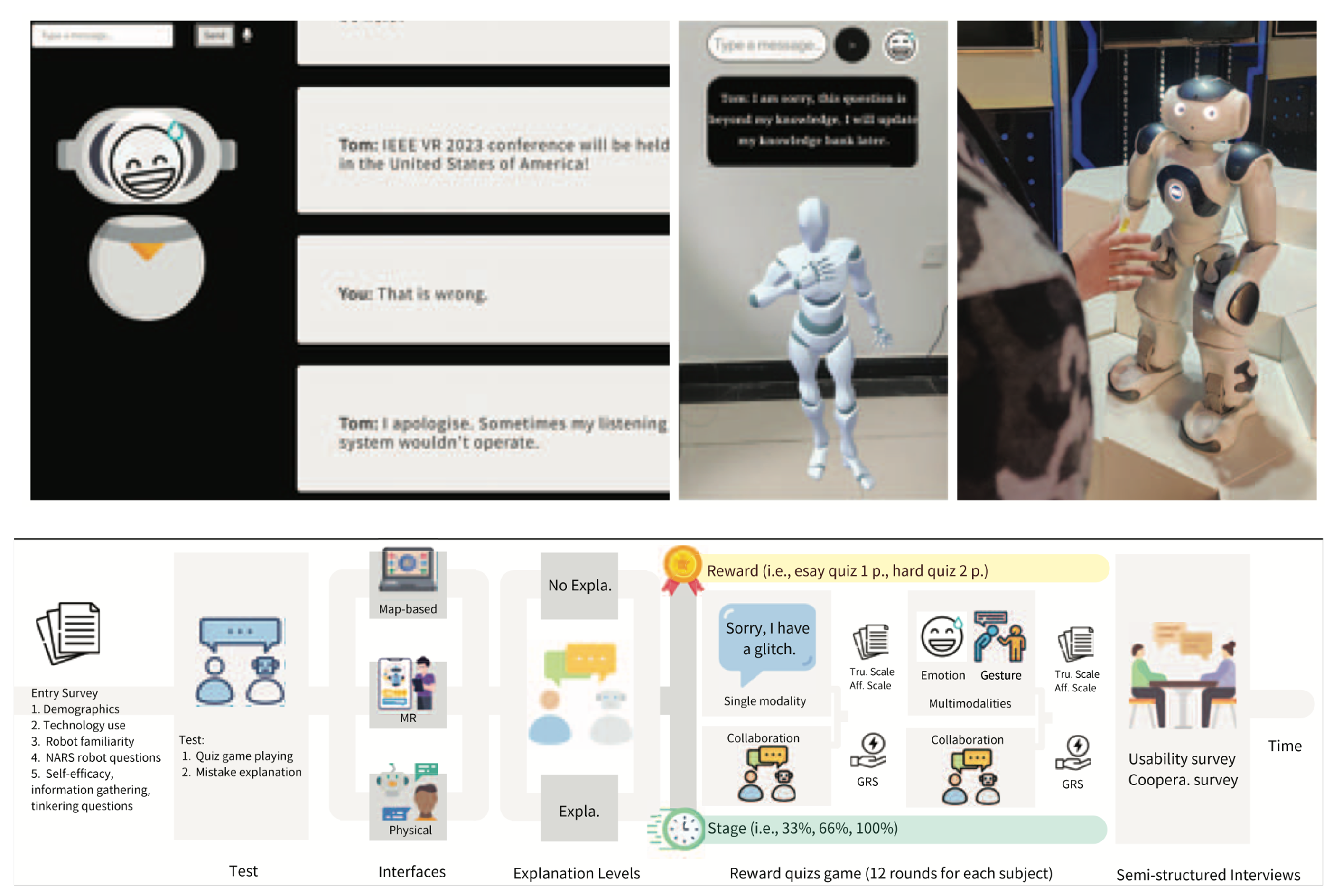
Multimodal Apology: Using WebXR to Repair Trust with Virtual Companion
2023 IEEE Conference on Virtual Reality and 3D User Interfaces IEEE VR 2023 Paper — A multimodal apology system using WebXR to investigate how virtual companions can repair trust after service failures through synchronized verbal and nonverbal cues.
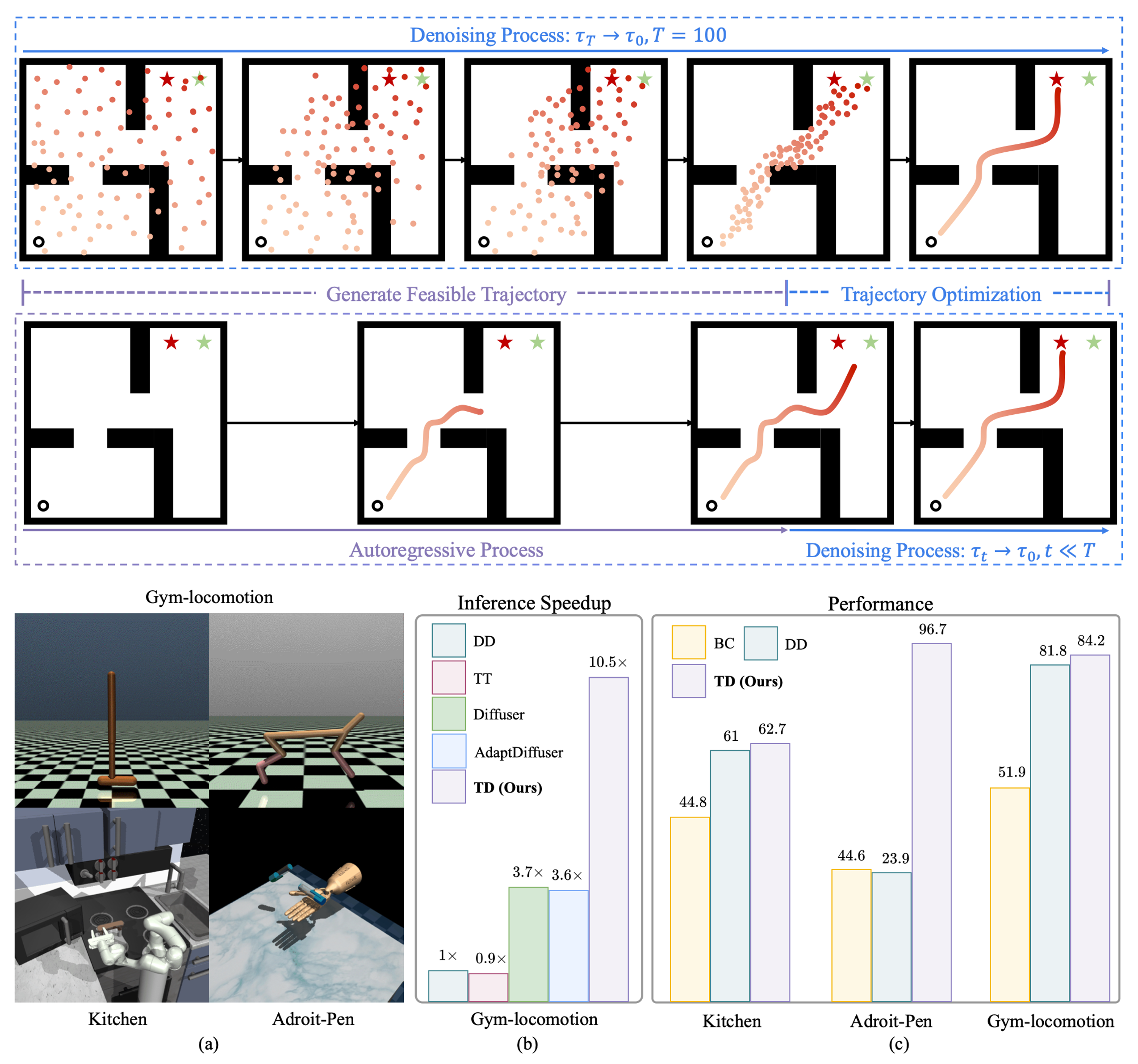
Diffusion Models as Optimizers for Efficient Planning in Offline RL
European Conference on Computer Vision ECCV 2024 arXiv — We leverage diffusion models as trajectory optimizers for offline reinforcement learning, achieving efficient planning by treating diffusion sampling as an optimization process.
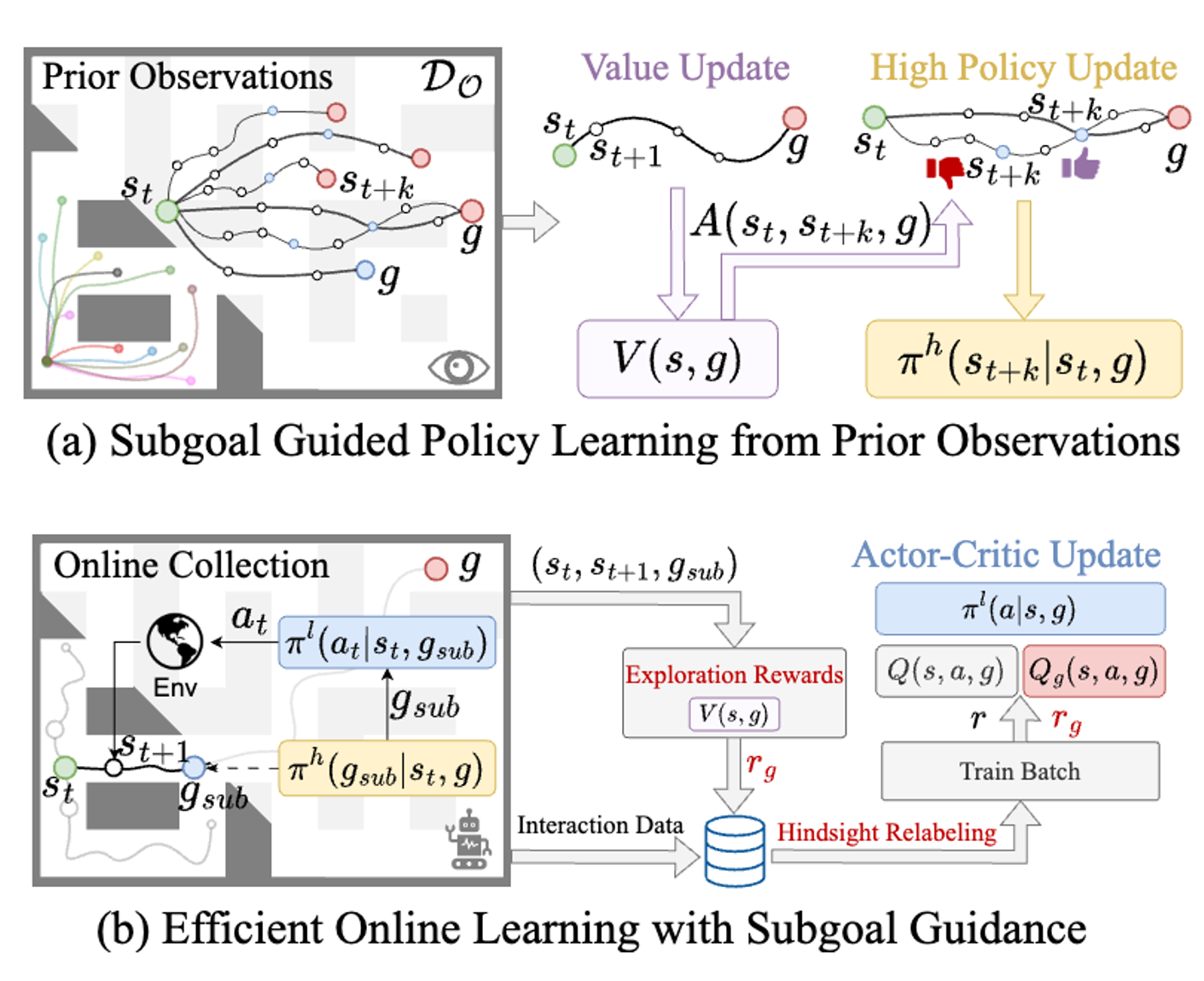
Goal-Reaching Policy Learning from Non-Expert Observations via Effective Subgoal Guidance
Conference on Robot Learning CoRL 2024 arXiv — We propose a subgoal-guided imitation learning framework that enables goal-reaching policy learning from non-expert, suboptimal observations without requiring expert demonstrations.
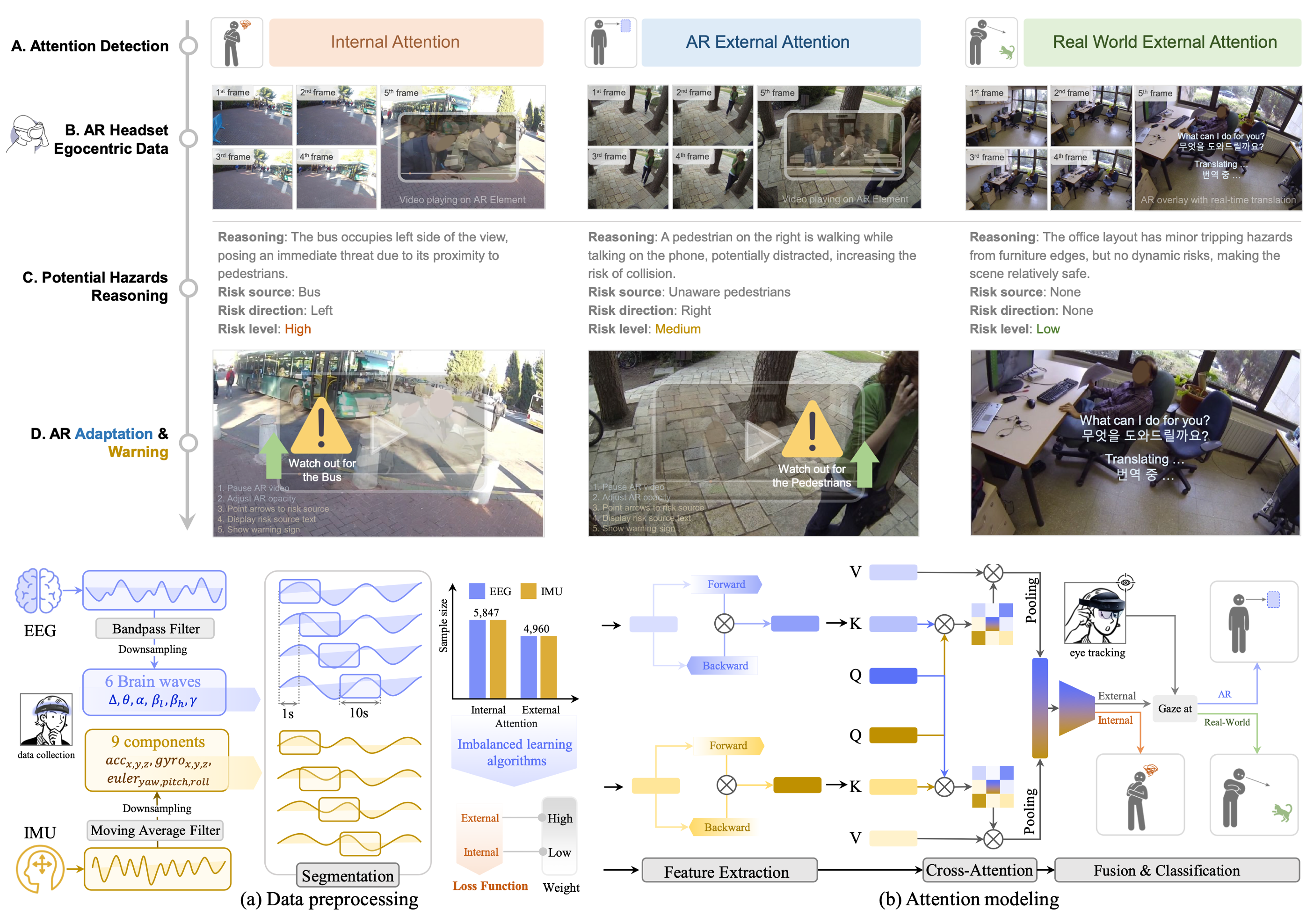
AttentionAR: AR Adaptation and Warning for Real-World Safety via Attention Modeling and MLLM Reasoning
Proceedings of the 38th Annual ACM Symposium on User Interface Software and Technology UIST 2025 Paper —
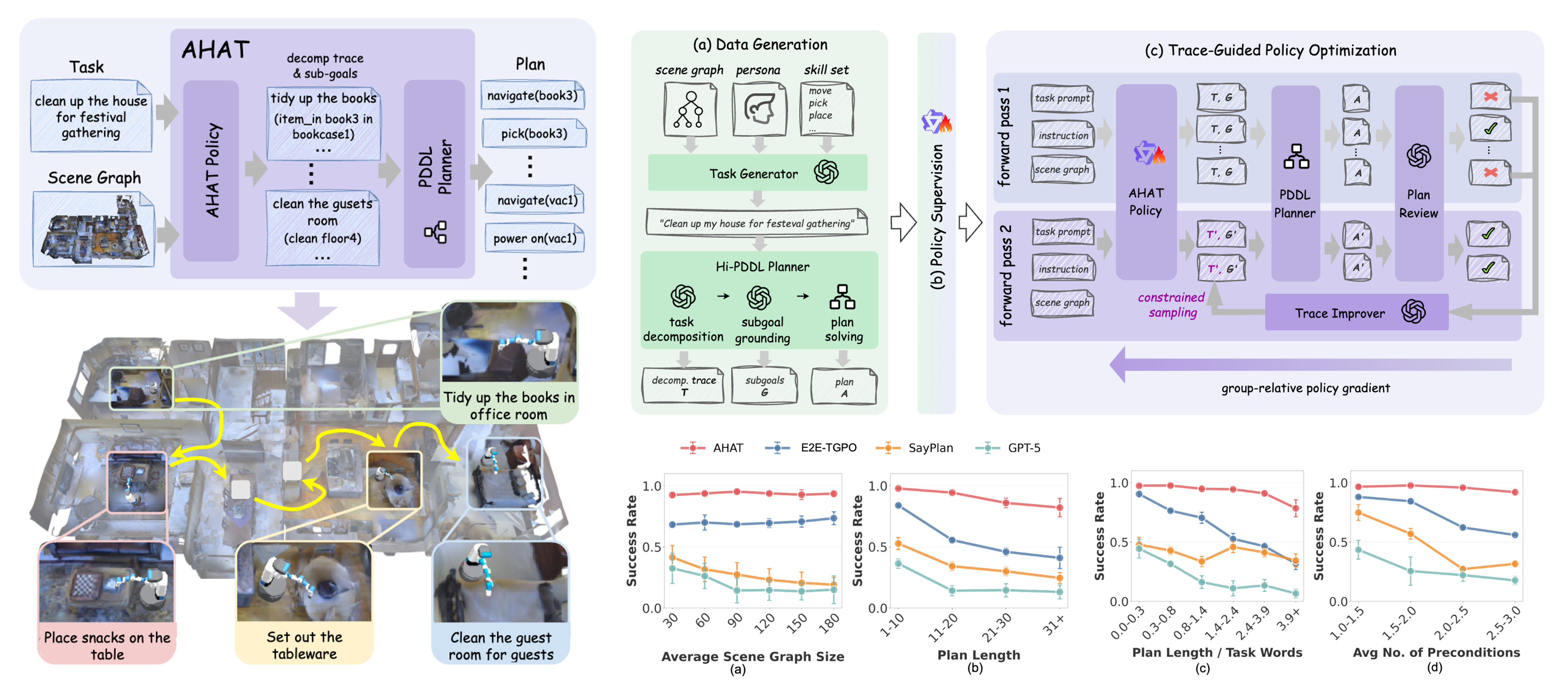
Any House Any Task: Scalable Long-Horizon Planning for Abstract Human Tasks
arXiv preprint arXiv arXiv — A scalable framework for long-horizon task planning that generalizes across diverse house layouts and abstract human task specifications.
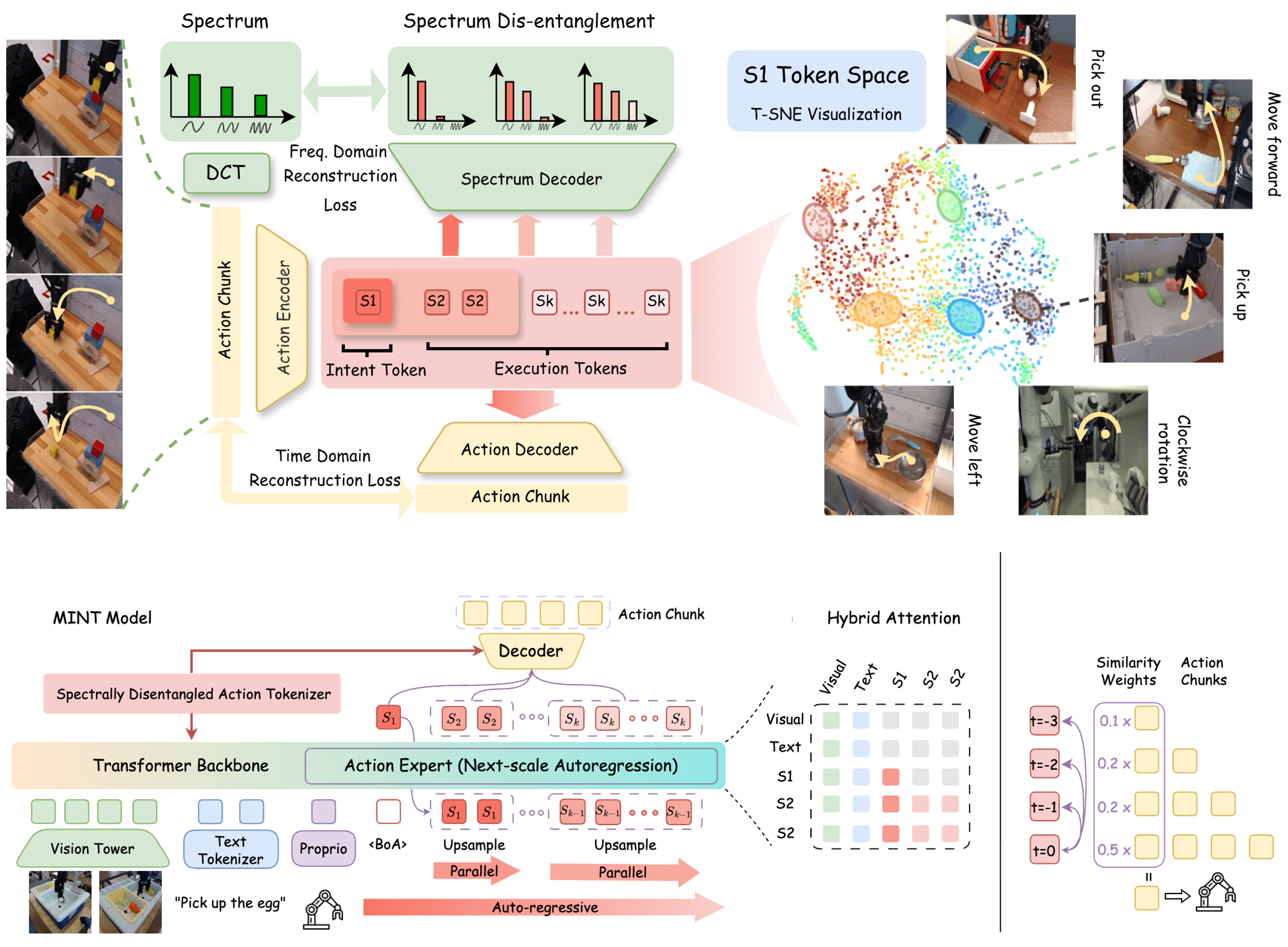
Mimic Intent, Not Just Trajectories
Robotics: Science and Systems RSS 2026 arXiv Code — We propose learning to mimic the underlying intent of demonstrations rather than directly copying trajectories, enabling more robust and generalizable robot behavior.